Link to English Version.
这篇文章是上位机和下位机新版本对接测试记录。
测试准备阶段
Step 1: 准备设备
-
上位机
在 Raspberry Pi 5 重新安装 PlatformIO 环境。运行前检查用户是否有窗口读写权限。
-
下位机
两个已组装完毕的机械臂,通过 USB 与上位机连接。
Step 2: 测试代码重构
- 核心改动:新增多 Arduino 下位机动态支持
- 服务端新增设备状态监听线程
- 连接端采用 JSON 编码 + Unix Socket 传输方案
- 测试重点:
- 服务端线程管理机制验证
- 连接端指令编解码可靠性测试
- 全链路通信稳定性验证(本地环回测试)
Step 3: 开发环境同步问题
问题现象:
-
IDE 配置文件冲突
.idea/workspace.xml 文件冲突解决方案:
- 手动删除冲突文件后执行
git pull - 后续添加
.gitignore规则
- 手动删除冲突文件后执行
-
虚拟环境创建异常
python3 -m venv .venv → Error: Directory not empty解决方案:
rm -rf .venv && python3 -m venv .venv
测试实施过程
系统架构示意图

stateDiagram-v2
PythonCLI --> Server
PythonCLI --> Connector
Server --> ComThread : Serial device detect
Server --> SerialDiscovery
关键问题解决
-
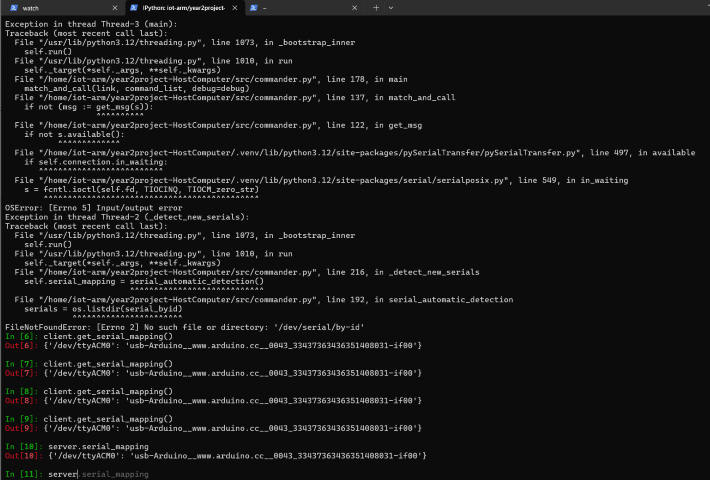
路径检测异常
- 现象:
/dev/serial/by-id路径动态变化导致服务崩溃 - 分析:当没有串口设备连接时,该路径会被移除。
- 方案:增加路径存在性检查
- 现象:
-
线程生命周期管理
- 现象:通信线程未随服务端关闭终止
- 方案:优化线程循环终止条件判断
测试成果
- 完成全链路通信验证
- 实现多设备动态管理
- 发布稳定版本
v0.1.0
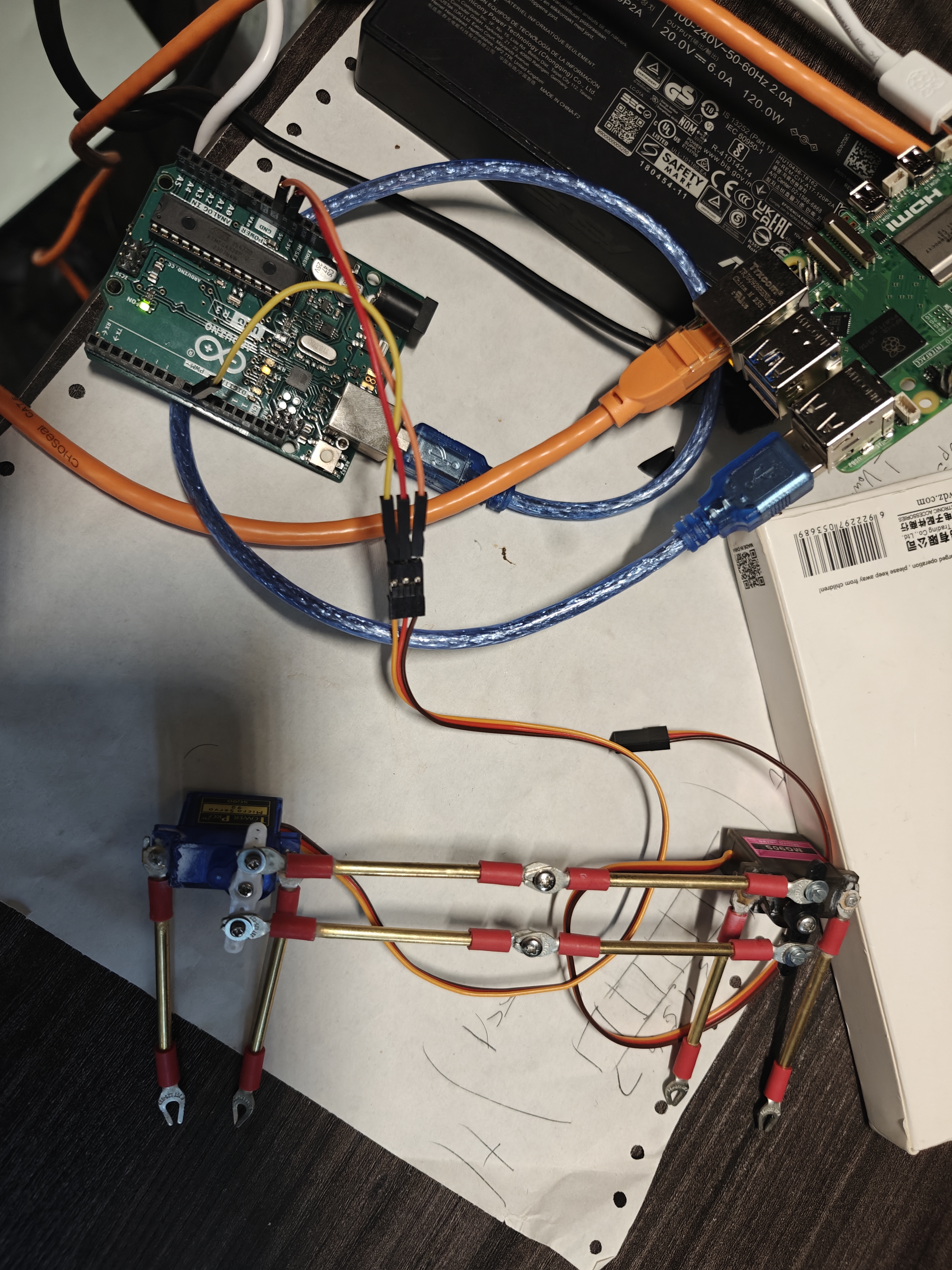
测试环境实拍: