Link to Chinese Version.
This article documents the integration testing between the new versions of host and slave systems.
Test Preparation Phase
Step 1: Equipment Preparation
Host Machine
- Reinstall PlatformIO environment on Raspberry Pi 5.
- Verify user read/write permissions for window operations before execution.
Slave Devices
- Two assembled robotic arms connected via USB to host machine.
Step 2: Test Code Restructuring
Core modifications:
- Added dynamic support for multiple Arduino slave devices.
- New device status monitoring thread on server side.
- JSON encoding + Unix Socket transmission scheme implemented.
Key test objectives:
- Server thread management mechanism verification.
- Command encoding/decoding reliability testing.
- Full-link communication stability verification (local loopback test).
Step 3: Development Environment Synchronisation Issues
Observed issues:
- IDE configuration file conflicts (
bash .idea/workspace.xml) - Virtual environment creation failure
python3 -m venv .venv → Error: Directory not empty
Solutions:
- Manual deletion of conflicting files followed by
git pull - Added
.gitignorerules for future prevention rm -rf .venv && python3 -m venv .venv
Test Implementation Process
System Architecture Diagram

stateDiagram-v2
PythonCLI --> Server
PythonCLI --> Connector
Server --> ComThread : Serial device detection
Server --> SerialDiscovery
Critical Issue Resolution
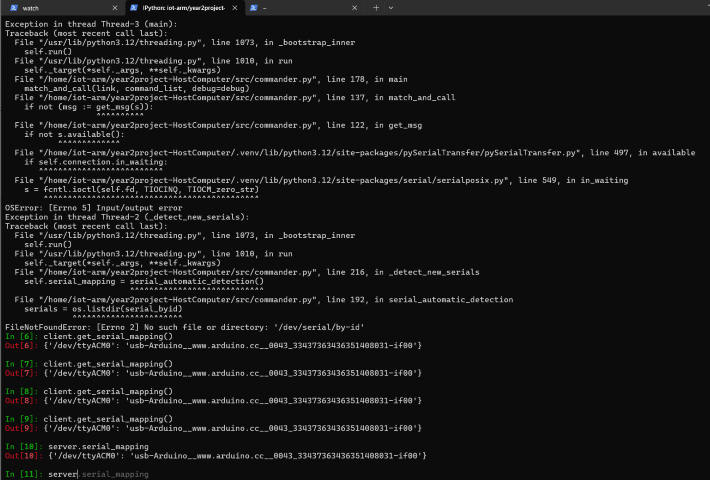
Path detection anomaly
- Issue: Dynamic changes in
/dev/serial/by-idpath causing service crashes. - Analysis: When there is no serial port device connection, the path will be removed.
- Solution: Implemented path existence checks.
Thread lifecycle management
- Issue: Communication threads not terminating with server shutdown.
- Solution: Optimised thread loop termination condition checks.
Test Achievements
- Completed full-link communication verification.
- Implemented dynamic multi-device management.
- Released stable version v0.1.0 .
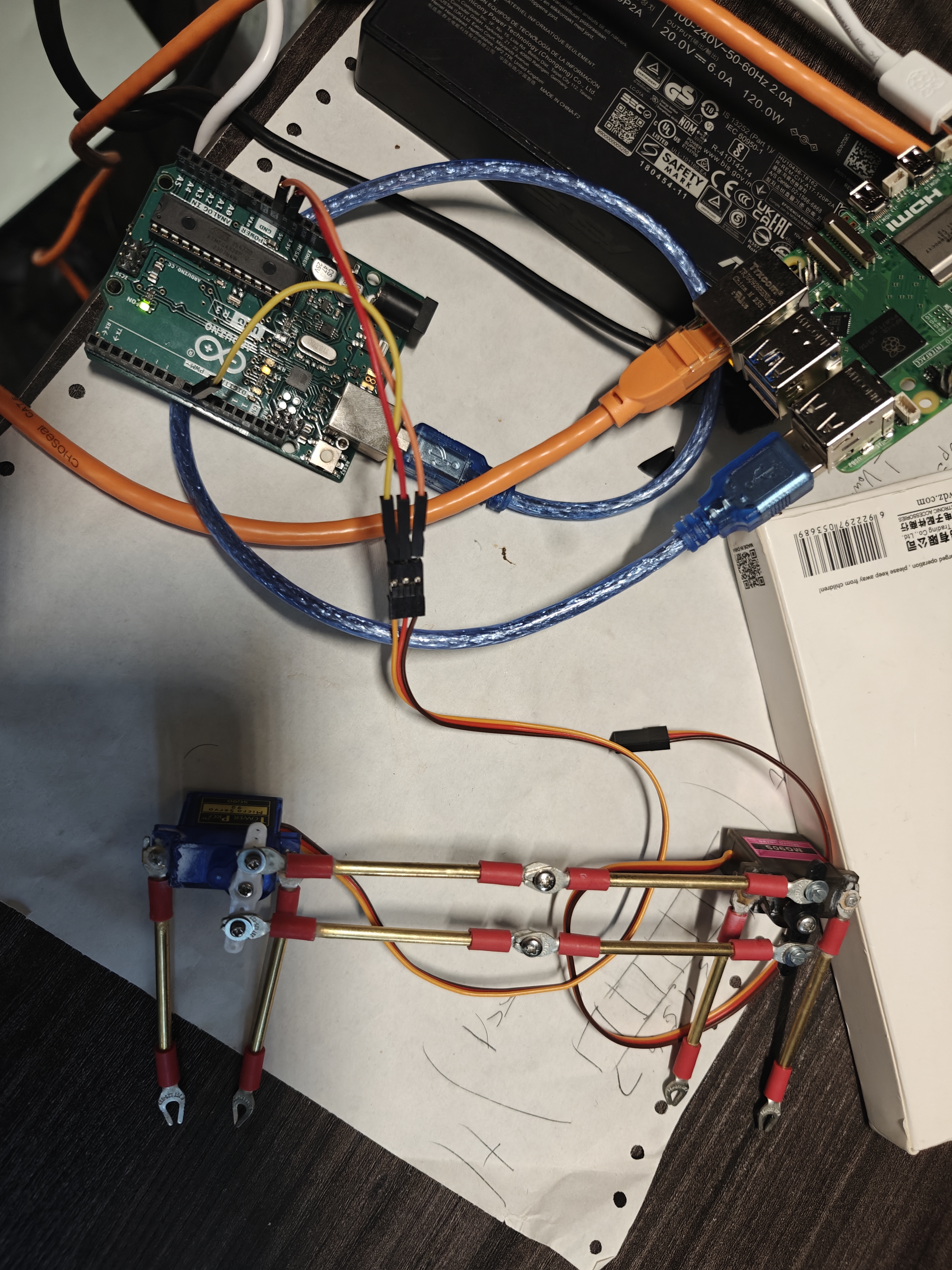
Test environment photo documentation: