Link to English Version.
在嵌入式开发中,下位机通常不参与决策,作为执行器或传感器使用。
此项目中,每个模块都作为下位机,执行上位机的指令。
开发中,下位机使用 Arduino Uno,上位机使用 Raspberry Pi 5。
代码设计
状态机设计
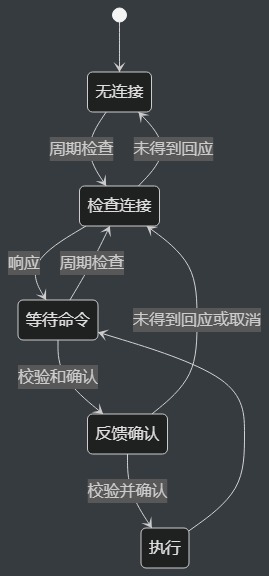
下位机不参与决策,可以将其视为状态机。
stateDiagram-v2
[*] --> 无连接
无连接 --> 检查连接: 周期检查
检查连接 --> 无连接: 未得到回应
检查连接 --> 等待命令: 响应
等待命令 --> 检查连接: 周期检查
等待命令 --> 反馈确认: 校验和确认
反馈确认 --> 执行: 校验并确认
反馈确认 --> 检查连接: 未得到回应或取消
执行 --> 等待命令
通信协议设计
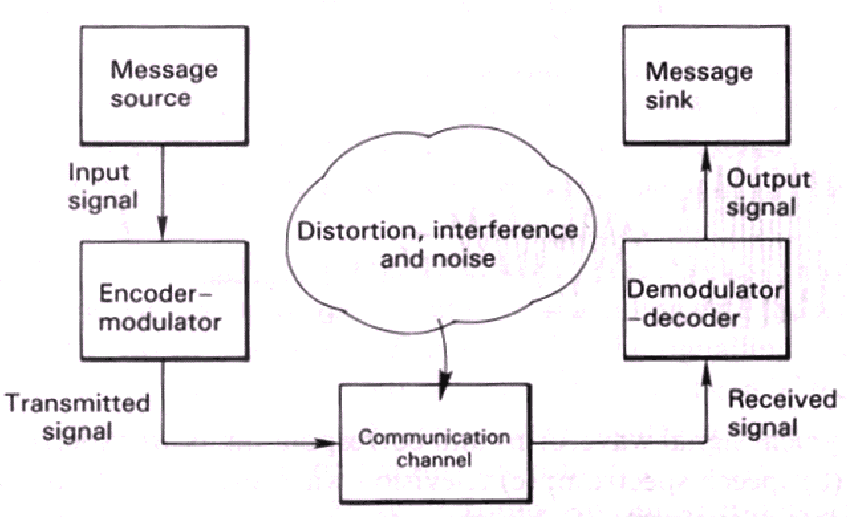
项目硬件层面(对应图中的 Communication Channel)的通信协议,选择了基于 USB 连接的 UART 通信,其优点如下:
- 易操作
- USB 线保证信道可靠性
在数据包发送前,要对其进行编码(对应图中的 Encoder-modulator 或许可以叫 “链路层”)。项目采用了嵌入式通信中常见的数据结构:

packet-beta
title UART Packet
0-7: "Start Byte"
8-15: "CRC"
16-79: "Data"
80-87: "Stop Byte"
数据层面的通信协议(对应图中 Message Source)根据状态机设计。
-
数据包结构,每个数据包大小为 16 byte 。该设计是出于与上位机的 Python 代码兼容,使得每个包长度正好等于两个
int类型,避免在 Python 中直接操作 ctype 或二进制.struct __attribute__((packed)) STRUCT_Message { int32_t msg_type; char data[4]; } Message; -
在数据包之上的连接协议分为三种,
pingwait和command。ping用于测试上位机是否在线,wait通知上位机当前下位机在等待指令,command是上位机发出指令到下位机返回执行结果的一系列消息。
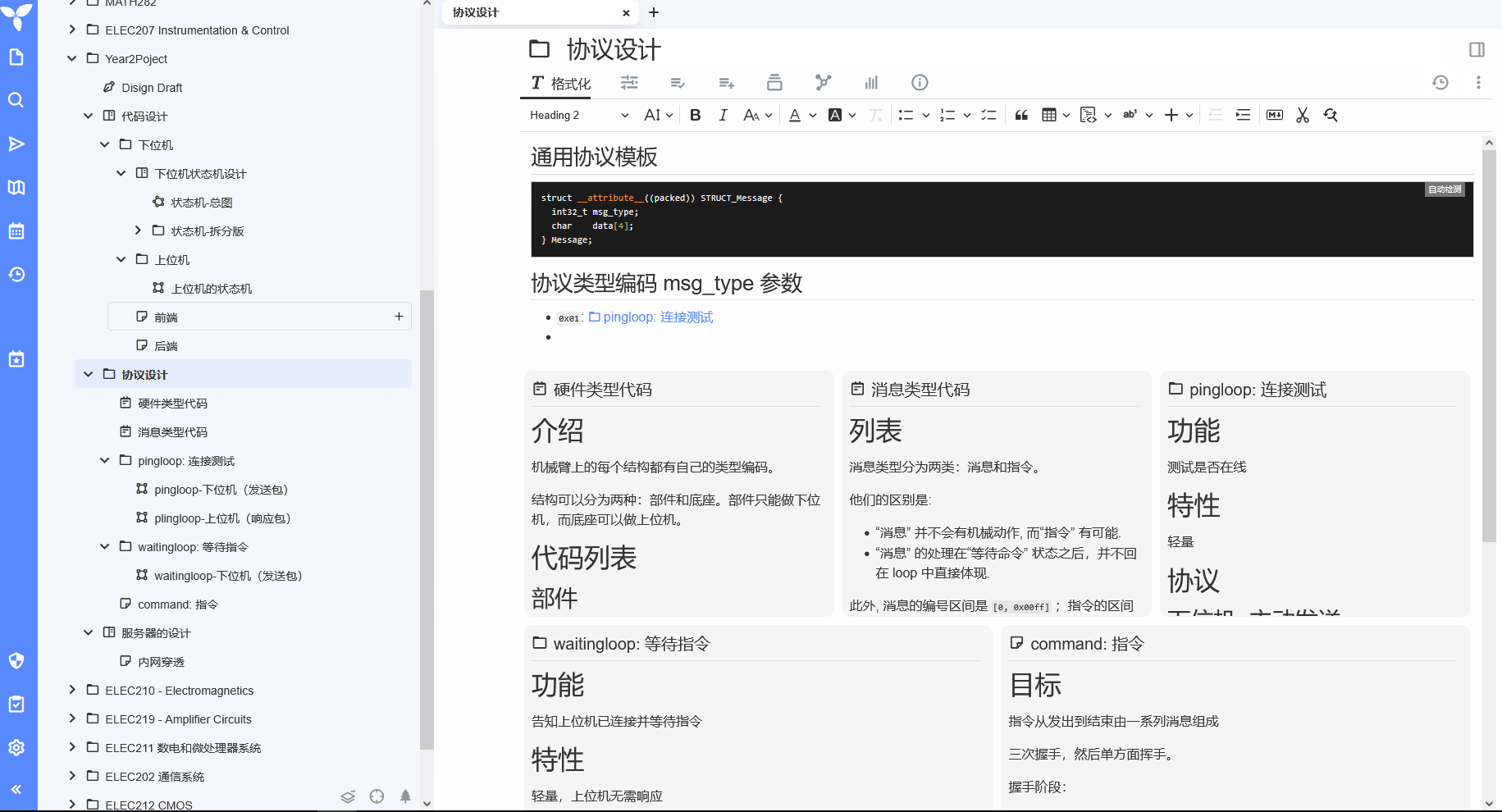
协议细节请参考 Year 2 Project 下位机的 Wiki.
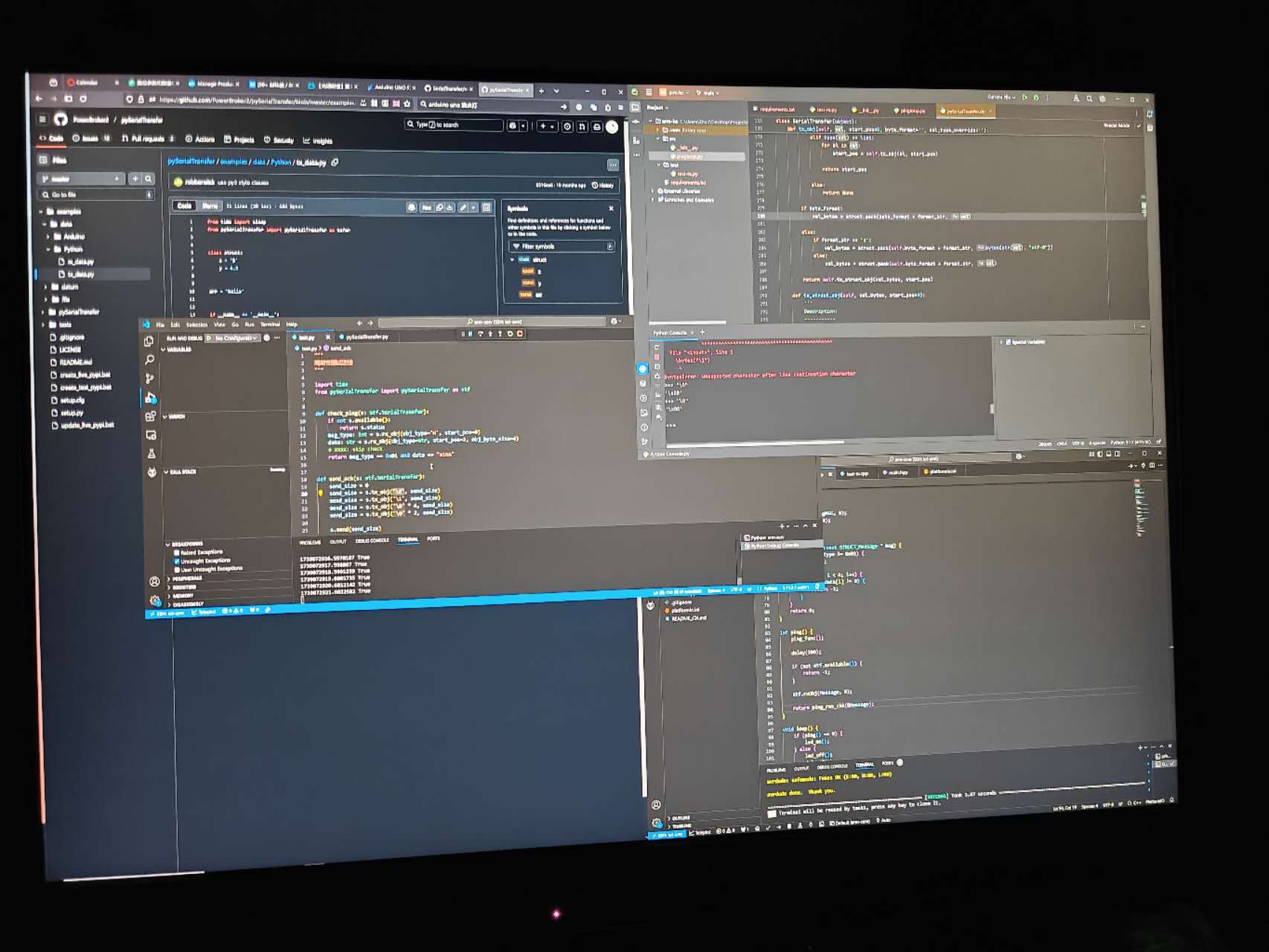
下图是开发过程中协议设计的截图:
调试设计
由于本项目的下位机没有显示屏,也没有终端,因此设备自带的 LED 闪烁表示当前状态。在该版本代码中,LED 闪烁表示与上位机未连接,常量表示与上位机连接。
问题和解决
通信/烧录过程提示串口占用
分析:上位机进程和烧录进程同时读写串口,导致冲突。
解决:在烧录前手动关闭上位机进程。
下位机连接时断时续
分析:在串口打印连接调试信息,发现 CRC 有概率校验失败。
解决:记录近 8 次的 ping 记录,若过半数连接成功,则视为与上位机连接。
成品测试
首先测试当上位机启动时,下位机是否显示连接成功,上位机断开后下位机是否切换回无连接状态。
下图中 vs code 终端表示上位机在该时间戳收到了下位机的 ping 消息,并校验成功。
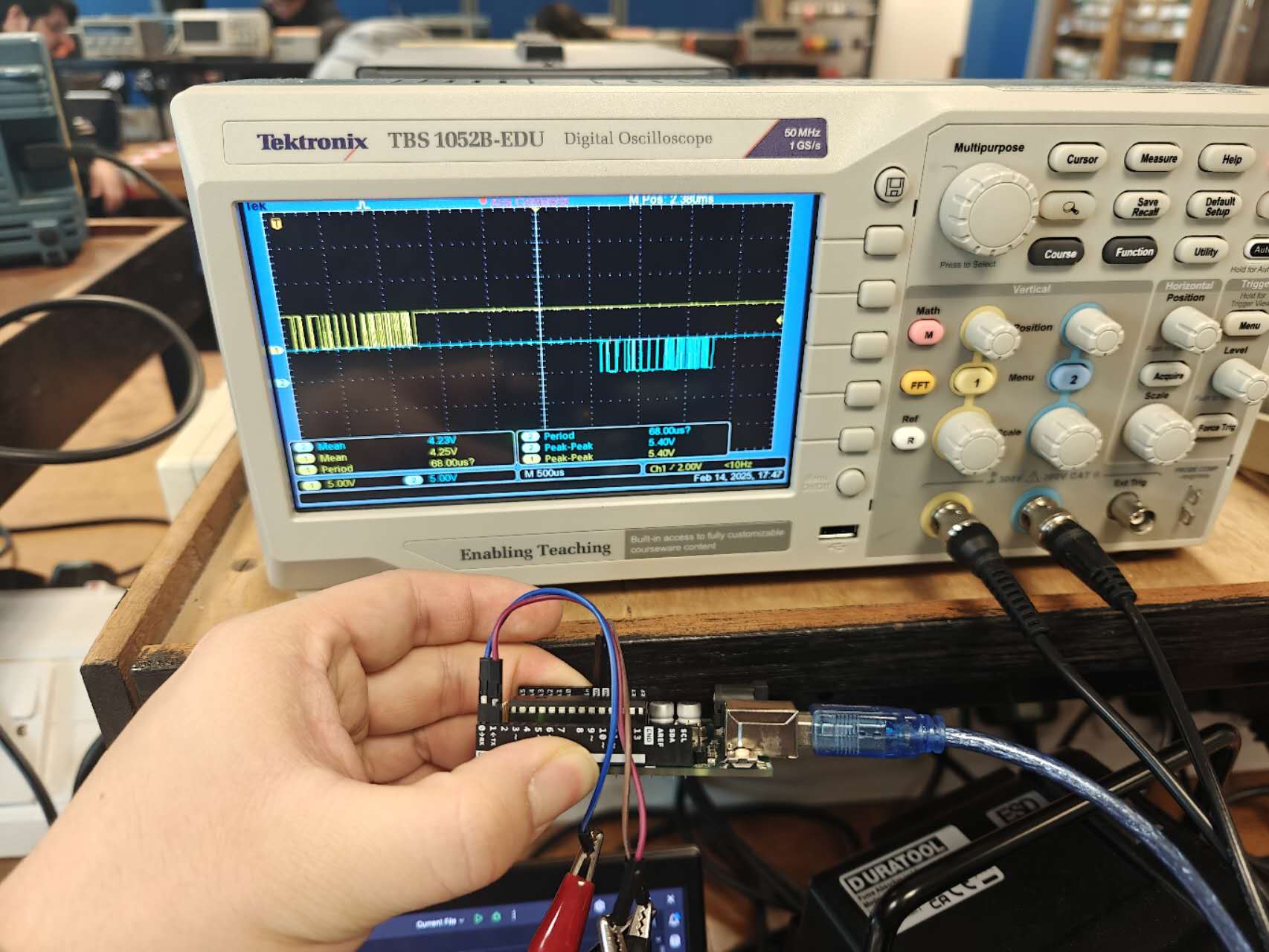
在 ping 测试成功后,尝试通过上位机控制舵机旋转。

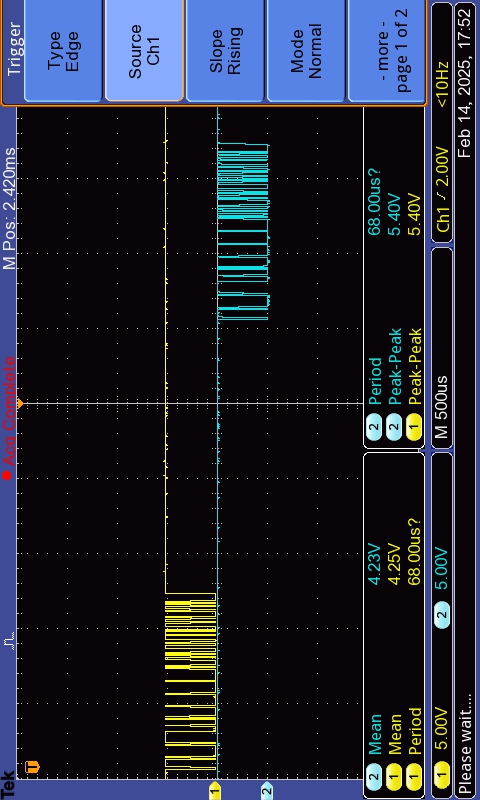
在示波器上捕获串口消息:
上位机和下位机的测试是同步的,可以阅读上位机开发的博文获取更多信息。
下图是测试时的视频节选: